Dr Fabrizia Luongo, DDS, MS, Periodontist, Rome, Italy
Introduction
There has been a considerable evolution in implant dentistry over recent years that has seen the design of dental implants adopt sophisticated thread profiles which leads to a better primary stability. Simultaneously these new geometries aid cortical bone maintenance through to platform-switching capabilities again designed to minimise bone loss. When combined with improved implant-prosthetic connections such as a Morse-locking conical connection it contributes to a good long-term prognosis and an aesthetic outcome.
Concurrent with this evolution in implant design have been substantial advances in digital technologies across the field of dentistry. These digital advances include Cone-beam CT scanning combined with appropriate 3D planning software, navigated surgery technology, 3D intra-oral scanning to create a ‘virtual impression’ and 3D printing technologies. These digital technologies can minimise the number of appointments found in a conventional treatment protocol as well as enabling greater accuracy and will be considered in this case study.
Case Study
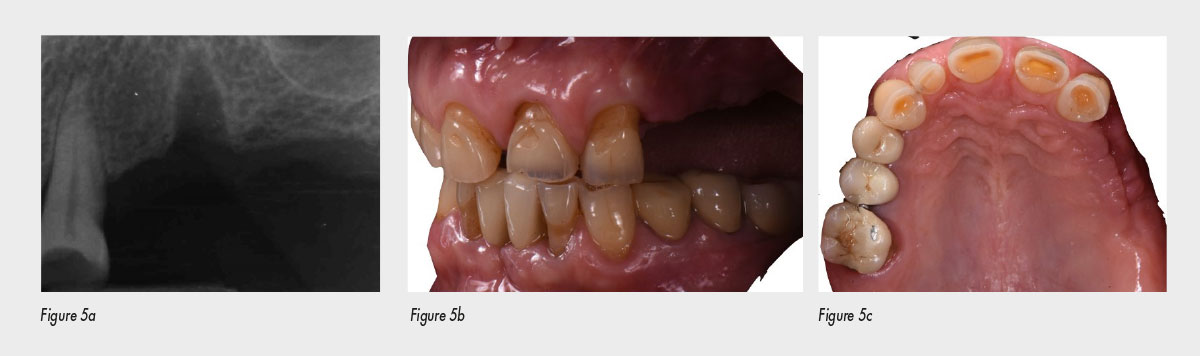
A 71-year-old female patient presented with a substantial number of dental problems. It was decided to split these into three treatment phases. Phase one dealt with the problems in quadrants 1 and 3, phase two is the subject of this case study which only considers the treatment of the failing implant at position 24. The case is ongoing and at time of writing the problems in the patients anterior (phase 3) are being addressed.

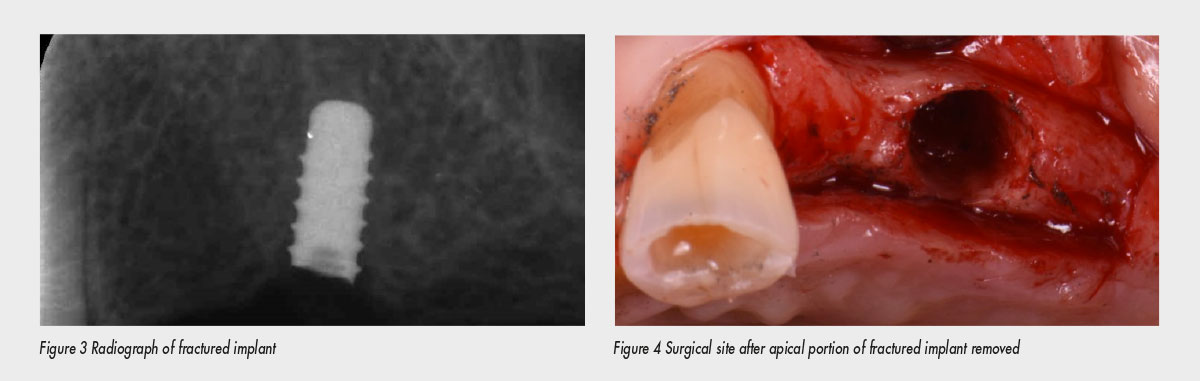
As phase two of the treatment plan commenced, the implant at 24 had fractured, so the initial surgery was to remove the remaining integrated segment of the implant using a very thin burr.
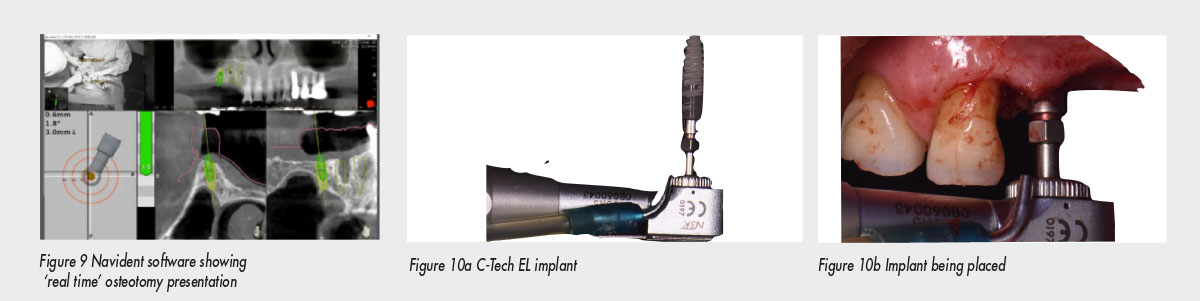
It was decided to use the Navident dynamic navigation system (ClaroNav, Toronto, Canada) to aid in the planning and placement of implants to restore quadrant 2. Dynamic navigation like guided surgery is reliant on CBCT scanning to provide 3-dimensional imaging data that can be imported to planning software in Digital Imaging Communication in Medicine (DICOM) format. Dynamic navigation differs from the more traditional guided surgery system as it uses standard drills and no stent to perform the surgery allowing for ‘real-time’ verification and validation of the positional accuracy of the drill in relation to the pre-planned implant site. In order for the software to dynamically track the drill and the patients jaw, three steps are undertaken; ‘scan, plan and place’. The patient underwent a CBCT scan and a virtual or analogical wax up was fabricated. The two files (DICOM and.stl of the wax up) are inserted into dedicated software and the treatment plan was designed combining an ideal implant position for a perfect prosthetic outcome using real atomy information.
This wax up was also used to fabricate a resin based provisional restoration to be inserted immediately after surgery. Treatment was performed under local anaesthesia and conscious sedation. Prior to surgery, the navigation software was set up and the appropriate protocols for calibrating both the drill axis and drill tips were performed.

The C-Tech (C-Tech, Bologna, Italy) Esthetic Line (EL) implant system was selected for this case for a number of reasons. The thread profiling of the implant was important as it is designed to adapt to different bone structures down the length of the implant. Micro-grooving at the head of the implant is designed for cortical maintenance, whilst below this the thread allows for enhanced bone to implant contact with an aggressive apical section that aids immediate placement and achievement of good primary stability. The platform switching design as well as a Morse locking connection system also help to prevent bone loss.
The drilling protocol for the C-Tech Esthetic Line system was followed, with the depth and angulation of the drill being checked on the monitor rather than in the mouth, an innovative technique that is perfected by a training backed learning process. An advantage of a navigated approach as opposed to traditional guided surgery is that the absence of a surgical guide ensures that the implant site is well irrigated. Osteotomies completed, three EL 3.5mm diameter implants were placed subcrestally at 24, 25 and 26, with implant lengths of 13mm, 11mm and 9mm respectively.
Primary stability of the implants was excellent, so scan bodies were placed on top of each implant and a digital impression was recorded using the Carestream CS 3600 intraoral scanner (Carestream Dental LLC, Atlanta, USA).

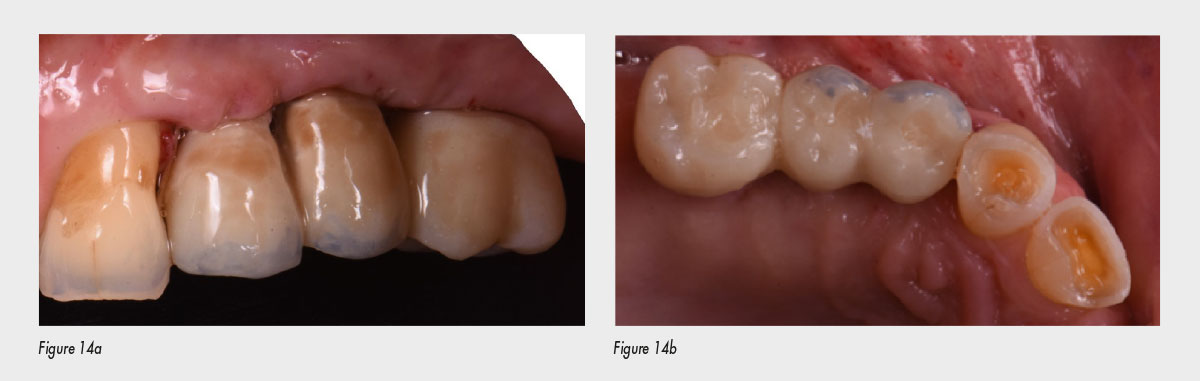
The provisional bridge was seated onto the implants and the occlusion adjusted. The provisional remains in function as at time of writing whilst the third phase of the treatment, the rehabilitation of the anterior maxilla continues. Once this is completed the definitive bridge will be fabricated and treatment concluded. Figures 14a & 14b Provisional bridge in place.
Conclusion
Navigated surgery provides guidance for accurate osteotomy preparation and as there is no surgical guide also allows for maximum irrigation of the implant site. Moreover, clear direct vision of the surgical site allows the clinician the freedom to adjust the original plan if necessary. The planning software which can incorporate both DICOM and .stl files, allows the clinician to formulate an optimal restorative led treatment plan taking account of the available anatomy to deliver the best prosthetic solution. The real time verification of drill angle and axis ensures correct placement of the implant which is imperative for an optimal restoration. The use of modern digital technologies coupled with an appropriate well-designed implant allows greater precision and, in this case, a fixed provisional restoration can be placed at time of surgery.